

 Italiano
ItalianoAutomation for sustainable water management in the rice sector
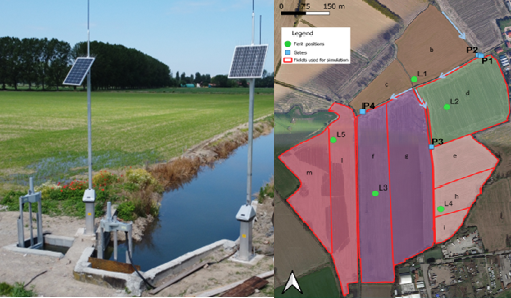 In Europe, Italy is the main producer of rice, with almost all production concentrated in the northwest of the country. Traditionally, rice is grown in fields that are flooded from before planting until just before harvest. This water management technique requires a great deal of labour for farmers who have to manually adjust the inlet and outlet gates to maintain a constant ponding water level in the fields, especially when there is a fluctuation of water supply at the farm inlet during the season or when impulsive water supplies are applied to the fields, for example as a result of rainfall events. In addition, the practice of flood irrigation is considered very water-intensive, although the adoption of new technologies based on coordinated systems of gates allows to increase the water conservation of this irrigation method. This work is part of a framework of experiments already in progress, where a series of modelling experiments in Modelica environment have already been carried out to assess effects of Proportional Integral (PI) Control and Nonlinear Model Prediction Control (NMPC) on gates, and where a pilot site in south Milan, equipped with a series of automated gates, is ready to host the test on a real field. Thus, the aim of this work is to implement the PI and NMPC strategies in the automatic gate system and to compare the performance of the one and the other control action during one agricultural season.
In Europe, Italy is the main producer of rice, with almost all production concentrated in the northwest of the country. Traditionally, rice is grown in fields that are flooded from before planting until just before harvest. This water management technique requires a great deal of labour for farmers who have to manually adjust the inlet and outlet gates to maintain a constant ponding water level in the fields, especially when there is a fluctuation of water supply at the farm inlet during the season or when impulsive water supplies are applied to the fields, for example as a result of rainfall events. In addition, the practice of flood irrigation is considered very water-intensive, although the adoption of new technologies based on coordinated systems of gates allows to increase the water conservation of this irrigation method. This work is part of a framework of experiments already in progress, where a series of modelling experiments in Modelica environment have already been carried out to assess effects of Proportional Integral (PI) Control and Nonlinear Model Prediction Control (NMPC) on gates, and where a pilot site in south Milan, equipped with a series of automated gates, is ready to host the test on a real field. Thus, the aim of this work is to implement the PI and NMPC strategies in the automatic gate system and to compare the performance of the one and the other control action during one agricultural season.
Design of a robot for barn automation
 Barn automation is gradually spreading more and more. Among the solutions offered by the market we can find, for example, mobile robots for cleaning the stable and for distributing feed. However, these solutions are characterized by a low level of automation, and more generally by extremely simple technological solutions, which make them robust but not very flexible.
Barn automation is gradually spreading more and more. Among the solutions offered by the market we can find, for example, mobile robots for cleaning the stable and for distributing feed. However, these solutions are characterized by a low level of automation, and more generally by extremely simple technological solutions, which make them robust but not very flexible.
This work concerns the design and implementation of an autonomous mobile robot, based on the Agilex Bunker commercial robot, for feed distribution. Compared to current commercial solutions, the robot will have to be able to navigate autonomously both inside and outside the stable, without requiring dedicated infrastructures (smooth paths, special localization devices, etc.).
The work may include an experimentation phase in a farm near Piacenza.
Design of a robot for vineyard pruning
 Vineyard automation is gradually spreading more and more. Among the solutions offered by the market we find, for example, machines capable of automatically harvesting the grapes, cutting the grass in the inter-row, performing treatments, etc. There are also many research projects concerning the autonomous navigation of robots in the vineyard, the collection of measurements to characterize the degree of ripening, etc. Despite this, pruning is one of the operations for which there are neither commercial solutions nor significant research efforts.
Vineyard automation is gradually spreading more and more. Among the solutions offered by the market we find, for example, machines capable of automatically harvesting the grapes, cutting the grass in the inter-row, performing treatments, etc. There are also many research projects concerning the autonomous navigation of robots in the vineyard, the collection of measurements to characterize the degree of ripening, etc. Despite this, pruning is one of the operations for which there are neither commercial solutions nor significant research efforts.
The pruning operation is usually carried out by an agronomist and requires specific experience and skills. However, in the case of spurred cordon systems it is possible to proceed with a first coarse pruning with automatic machinery which should be followed by a second fine pruning carried out automatically or semi-automatically with a robot.
This work concerns the design and construction of a robotic arm capable of carrying out the pruning operation in an automatic or semi-automatic way.
The work may include an experimentation phase in a farm near Piacenza.
Localization and mapping for vineyard applications
 Localization and mapping are two fundamental parts of the navigation system of an autonomous robot. Mapping is the procedure that allows the robot, using the available sensors, to generate a map of the environment. Localization, instead, is the procedure that allows the robot, using its sensors and a map of the environment, to determine its position and orientation with respect to a fixed reference frame.
Localization and mapping are two fundamental parts of the navigation system of an autonomous robot. Mapping is the procedure that allows the robot, using the available sensors, to generate a map of the environment. Localization, instead, is the procedure that allows the robot, using its sensors and a map of the environment, to determine its position and orientation with respect to a fixed reference frame.
Are these tasks required to autonomously navigate in a vienyard?
Do we really need to set up a map of the vineyard using sensors, or can we rely on the known row structure?
Do we really need a complex localization algorithm, or can we rely on GPS measurements only?
Are the localization and mapping approaches that are usually adopted in robotics and autonomous vehicles suitable for the vineyard, or can we devise more simple approaches that are able to exploit, as much as possible, the row structure?
This work aims at answering one or more of the previous questions in order to setup simple, efficient, and reliable localization and mapping techniques to autonomously navigate in a vineyard.
LFT modelling and identification of BMP tests
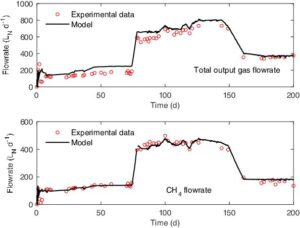
 The Biochemical Methane Potential (BMP) test is an essential tool to derive practical knowledge for optimizing and operating full-scale anaerobic digesters, monitoring, modelling, and evaluating process performances, or when a scenario analysis is being developed. Despite its usefulness is undoubted, long duration of BMP tests is problematic for many of its applications, especially when prompt results to take decisions are required. Over the last decades, several scientific contributions demonstrated that a reduction of BMP test duration is possible by predicting the final gas production. The purpose of this thesis work is the development of a new procedure/algorithm to obtain a preliminary estimation of the experimental BMP result by using a linear fractional transformation (LFT) formulation of the original nonlinear model for the identification of its parameters. The efficacy and the efficiency of the algorithm developed will be verified using experimental data of BMP tests performed on different substrates commonly fed to anaerobic digesters.
The Biochemical Methane Potential (BMP) test is an essential tool to derive practical knowledge for optimizing and operating full-scale anaerobic digesters, monitoring, modelling, and evaluating process performances, or when a scenario analysis is being developed. Despite its usefulness is undoubted, long duration of BMP tests is problematic for many of its applications, especially when prompt results to take decisions are required. Over the last decades, several scientific contributions demonstrated that a reduction of BMP test duration is possible by predicting the final gas production. The purpose of this thesis work is the development of a new procedure/algorithm to obtain a preliminary estimation of the experimental BMP result by using a linear fractional transformation (LFT) formulation of the original nonlinear model for the identification of its parameters. The efficacy and the efficiency of the algorithm developed will be verified using experimental data of BMP tests performed on different substrates commonly fed to anaerobic digesters.
Development of a Modelica library for the simulation of the biochemical processes of anaerobic digestion
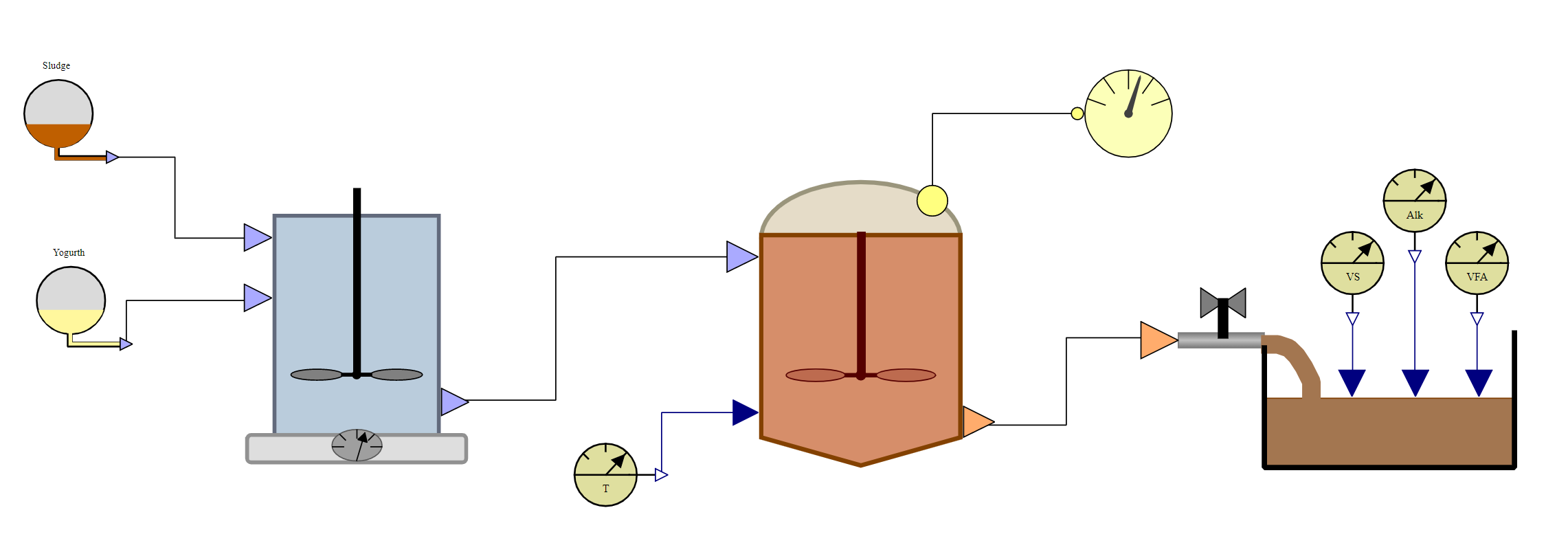 The environmental emergency resulting from global warming is multiplying efforts to reduce carbon dioxide emissions on the one hand and scientific research on the sequestration techniques of these emissions and on the production of renewable energy on the other. In particular, in recent years there has been a growing diffusion of biochemical digestion plants for agricultural and urban waste for the production of biofuels. The thesis work will aim at the creation of a Modelica library for the simulation of the systems of the biochemical processes of anaerobic digestion. Validation of the library based on data from pilot and full-scale plants is envisaged, and possibly the synthesis of optimal strategies for commissioning the plants.
The environmental emergency resulting from global warming is multiplying efforts to reduce carbon dioxide emissions on the one hand and scientific research on the sequestration techniques of these emissions and on the production of renewable energy on the other. In particular, in recent years there has been a growing diffusion of biochemical digestion plants for agricultural and urban waste for the production of biofuels. The thesis work will aim at the creation of a Modelica library for the simulation of the systems of the biochemical processes of anaerobic digestion. Validation of the library based on data from pilot and full-scale plants is envisaged, and possibly the synthesis of optimal strategies for commissioning the plants.
LFT-based identification of index 1 nonlinear DAE systems
 Parameter identification of nonlinear systems, based on a reformulation of the model in LFT form, has already been successfully applied in various application cases, from biochemical processes to vehicle dynamics. For this purpose, a MATLAB toolbox was created. The primary goal of the thesis will be the extension of the toolbox to the case of DAE systems (systems of algebraic-differential equations) of index 1. As an application case, the parameter identification of an innovative process for the production of biogas will be considered. Furthermore, the method will be compared with other tools for parametric identification not based on the use of derivatives for the calculation of sensitivities.
Parameter identification of nonlinear systems, based on a reformulation of the model in LFT form, has already been successfully applied in various application cases, from biochemical processes to vehicle dynamics. For this purpose, a MATLAB toolbox was created. The primary goal of the thesis will be the extension of the toolbox to the case of DAE systems (systems of algebraic-differential equations) of index 1. As an application case, the parameter identification of an innovative process for the production of biogas will be considered. Furthermore, the method will be compared with other tools for parametric identification not based on the use of derivatives for the calculation of sensitivities.