

 English
EnglishAutomazione a servizio della sostenibilità nella gestione delle risorse idriche nel comparto risicolo
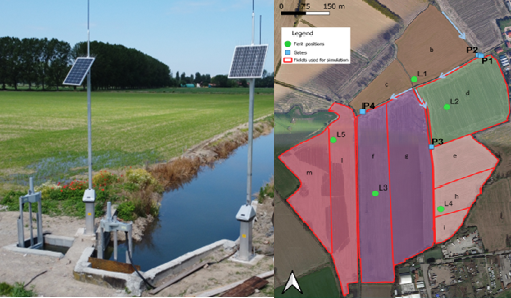 In Europa, l’Italia è il principale produttore di riso, con la quasi totalità della produzione concentrata nel nord-ovest del Paese. Tradizionalmente, il riso viene coltivato in appezzamenti che vengono allagati dalla semina fino a poco prima della raccolta. Questa tecnica di gestione dell’acqua richiede un grande sforzo da parte degli agricoltori che devono regolare manualmente i flussi di acqua in ingresso e di uscita ad ogni appezzamento (per mezzo di semplici paratoie) per mantenere un livello costante di acqua nei campi, specialmente quando c’è una fluttuazione delle portate in ingresso all’azienda o quando sui campi si riversano apporti idrici improvvisi (come ad esempio quelli dovuti alla pioggia). In aggiunta, la pratica tradizionale di irrigazione del riso è una delle più idroesigenti anche se si è recentemente dimostrato che l’adozione di nuove tecnologie basate sistemi coordinati di paratoie sono in grado di conservare un’aliquota significativa di acqua durante le manovre di irrigazione. Il lavoro di tesi, si inserisce in un quadro di sperimentazioni già in atto dove da un lato gli effetti di una gestione proporzionale-integrale (PI) e un’azione di controllo predittivo (NMPC) sulle porte sono già stati valutati attraverso una serie di esperimenti modellistici condotti in ambiente Modelica, e dall’altro un sito pilota alle porte di Milano dotato di una serie di paratoie automatizzate è pronto ad accogliere i sopramenzionati algoritmi di regolazione per un test su un dominio di studio reale.
In Europa, l’Italia è il principale produttore di riso, con la quasi totalità della produzione concentrata nel nord-ovest del Paese. Tradizionalmente, il riso viene coltivato in appezzamenti che vengono allagati dalla semina fino a poco prima della raccolta. Questa tecnica di gestione dell’acqua richiede un grande sforzo da parte degli agricoltori che devono regolare manualmente i flussi di acqua in ingresso e di uscita ad ogni appezzamento (per mezzo di semplici paratoie) per mantenere un livello costante di acqua nei campi, specialmente quando c’è una fluttuazione delle portate in ingresso all’azienda o quando sui campi si riversano apporti idrici improvvisi (come ad esempio quelli dovuti alla pioggia). In aggiunta, la pratica tradizionale di irrigazione del riso è una delle più idroesigenti anche se si è recentemente dimostrato che l’adozione di nuove tecnologie basate sistemi coordinati di paratoie sono in grado di conservare un’aliquota significativa di acqua durante le manovre di irrigazione. Il lavoro di tesi, si inserisce in un quadro di sperimentazioni già in atto dove da un lato gli effetti di una gestione proporzionale-integrale (PI) e un’azione di controllo predittivo (NMPC) sulle porte sono già stati valutati attraverso una serie di esperimenti modellistici condotti in ambiente Modelica, e dall’altro un sito pilota alle porte di Milano dotato di una serie di paratoie automatizzate è pronto ad accogliere i sopramenzionati algoritmi di regolazione per un test su un dominio di studio reale.
Pertanto, l’obiettivo del lavoro è quello di introdurre nel sistema di porte automatiche le strategie PI e NMPC confrontando, all’interno di una stagione agraria, le performance dell’una e dell’altra azione di controllo.
Progetto di un robot per l’automazione della stalla
 L’automazione della stalla è una realtà che si sta via via sempre più diffondendo. Tra le soluzioni proposte dal mercato troviamo, per esempio, robot mobili per la pulizia della stalla e per la distribuzione del mangime. Queste soluzioni, tuttavia, sono caratterizzate da un livello di automazione non elevato, e più in generale da soluzioni tecnologiche estremamente semplici, che le rendono robuste ma poco flessibili.
L’automazione della stalla è una realtà che si sta via via sempre più diffondendo. Tra le soluzioni proposte dal mercato troviamo, per esempio, robot mobili per la pulizia della stalla e per la distribuzione del mangime. Queste soluzioni, tuttavia, sono caratterizzate da un livello di automazione non elevato, e più in generale da soluzioni tecnologiche estremamente semplici, che le rendono robuste ma poco flessibili.
Questo lavoro riguarda la progettazione e realizzazione di un robot mobile autonomo, basato sul robot commerciale Agilex Bunker, per la distribuzione del mangime. Rispetto alle attuali soluzioni commerciali il robot dovrà essere in grado di navigare in modo autonomo sia all’interno che all’esterno della stalla, senza richiedere infrastrutture dedicate (percorsi non accidentati, dispositivi speciali per localizzazione, etc.).
Il lavoro potrà includere una fase di sperimentazione in un’azienda agricola del piacentino.
Progetto di un robot per la potatura automatica del vigneto
 L’automazione dei processi produttivi nel vigneto è una realtà che si sta via via sempre più diffondendo. Tra le soluzioni proposte dal mercato troviamo, per esempio, macchine in grado di effettuare la raccolta automatica dell’uva, il taglio dell’erba nell’interfilare, i trattamenti, etc. Vi sono inoltre molti progetti di ricerca che riguardano la navigazione autonoma di robot in vigna, la raccolta di misure per caratterizzare il grado di maturazione, etc. Nonostante questo, la potatura è una delle operazioni per cui non esistono soluzioni commerciali e nemmeno significativi sforzi dal punto di vista della ricerca. L’operazione di potatatura è di norma effettuata da un agronomo e richiede esperienza e competenze specifiche. Tuttavia, nel caso degli impianti a cordone speronato è possibile procedere ad una prima potatura grossolana con macchinari automatici a cui si vorrebbe far seguire una seconda potatura effettuata in modo automatico o semi-automatico con un robot.
L’automazione dei processi produttivi nel vigneto è una realtà che si sta via via sempre più diffondendo. Tra le soluzioni proposte dal mercato troviamo, per esempio, macchine in grado di effettuare la raccolta automatica dell’uva, il taglio dell’erba nell’interfilare, i trattamenti, etc. Vi sono inoltre molti progetti di ricerca che riguardano la navigazione autonoma di robot in vigna, la raccolta di misure per caratterizzare il grado di maturazione, etc. Nonostante questo, la potatura è una delle operazioni per cui non esistono soluzioni commerciali e nemmeno significativi sforzi dal punto di vista della ricerca. L’operazione di potatatura è di norma effettuata da un agronomo e richiede esperienza e competenze specifiche. Tuttavia, nel caso degli impianti a cordone speronato è possibile procedere ad una prima potatura grossolana con macchinari automatici a cui si vorrebbe far seguire una seconda potatura effettuata in modo automatico o semi-automatico con un robot.
Questo lavoro riguarda la progettazione e realizzazione di un braccio robotico in grado di svolgere l’operazione di potatura in modo automatico o semi-automatico.
Il lavoro potrà includere una fase di sperimentazione in un’azienda agricola del piacentino.
Localizzazione e mapping per applicazioni in vigna
 La localizzazione e il mapping sono due parti fondamentali del sistema di navigazione di un robot autonomo. Il mapping è la procedura che consente al robot, utilizzando i sensori disponibili, di generare una mappa dell’ambiente. La localizzazione, invece, è la procedura che permette al robot, utilizzando i suoi sensori e una mappa dell’ambiente, di determinare la sua posizione e il suo orientamento rispetto ad un sistema di riferimento fisso.
La localizzazione e il mapping sono due parti fondamentali del sistema di navigazione di un robot autonomo. Il mapping è la procedura che consente al robot, utilizzando i sensori disponibili, di generare una mappa dell’ambiente. La localizzazione, invece, è la procedura che permette al robot, utilizzando i suoi sensori e una mappa dell’ambiente, di determinare la sua posizione e il suo orientamento rispetto ad un sistema di riferimento fisso.
Questi algoritmi sono necessari per navigare autonomamente in un vigneto?
Abbiamo davvero bisogno di allestire una mappa del vigneto utilizzando i sensori o possiamo fare affidamento sulla struttura dei filari che è nota a priori?
Abbiamo davvero bisogno di un algoritmo di localizzazione complesso o possiamo fare affidamento solo sulle misure GPS?
Gli approcci di localizzazione e mapping che solitamente vengono adottati in robotica e nei veicoli autonomi sono adatti al vigneto, oppure possiamo ideare approcci più semplici che riescano a sfruttare, per quanto possibile, la struttura del filare?
Questo lavoro mira a rispondere a una o più delle domande precedenti al fine di progettare tecniche di localizzazione e mapping semplici, efficienti e affidabili per navigare autonomamente in un vigneto.
Modellazione LFT e identificazione di test BMP
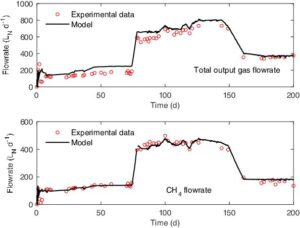
 Il test del potenziale di metano biochimico (BMP) è uno strumento essenziale per ricavare conoscenze pratiche per l’ottimizzazione e il funzionamento di digestori anaerobici su vasta scala, il monitoraggio, la modellazione e la valutazione delle prestazioni del processo, o quando è in corso lo sviluppo di un’analisi di scenario. Nonostante la sua utilità sia indubbia, la lunga durata dei test BMP è problematica per molte delle sue applicazioni, soprattutto quando sono richiesti risultati tempestivi per prendere decisioni. Negli ultimi decenni, numerosi contributi scientifici hanno dimostrato che una riduzione della durata del test BMP è possibile prevedendo la produzione finale di gas. Lo scopo di questo lavoro di tesi è lo sviluppo di una nuova procedura/algoritmo per ottenere una stima preliminare del risultato sperimentale BMP utilizzando una formulazione di trasformazione frazionaria lineare (LFT) del modello non lineare originale per l’identificazione dei suoi parametri. L’efficacia e l’efficienza dell’algoritmo sviluppato saranno verificate utilizzando i dati sperimentali dei test BMP eseguiti su diversi substrati comunemente alimentati ai digestori anaerobici.
Il test del potenziale di metano biochimico (BMP) è uno strumento essenziale per ricavare conoscenze pratiche per l’ottimizzazione e il funzionamento di digestori anaerobici su vasta scala, il monitoraggio, la modellazione e la valutazione delle prestazioni del processo, o quando è in corso lo sviluppo di un’analisi di scenario. Nonostante la sua utilità sia indubbia, la lunga durata dei test BMP è problematica per molte delle sue applicazioni, soprattutto quando sono richiesti risultati tempestivi per prendere decisioni. Negli ultimi decenni, numerosi contributi scientifici hanno dimostrato che una riduzione della durata del test BMP è possibile prevedendo la produzione finale di gas. Lo scopo di questo lavoro di tesi è lo sviluppo di una nuova procedura/algoritmo per ottenere una stima preliminare del risultato sperimentale BMP utilizzando una formulazione di trasformazione frazionaria lineare (LFT) del modello non lineare originale per l’identificazione dei suoi parametri. L’efficacia e l’efficienza dell’algoritmo sviluppato saranno verificate utilizzando i dati sperimentali dei test BMP eseguiti su diversi substrati comunemente alimentati ai digestori anaerobici.
Sviluppo di una libreria Modelica per la simulazione dei processi biochimici di digestione anaerobica
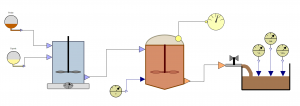 L’emergenza ambientale conseguente al riscaldamento globale sta moltiplicando da un lato gli sforzi per la riduzione delle emissioni di anidride carbonica e dall’altro la ricerca scientifica sulle tecniche di sequestro di tali emissioni e sulla produzione di energie rinnovabili. In particolare, negli ultimi anni si è registrata una crescente diffusione degli impianti di digestione biochimica degli scarti agricoli e urbani per la produzione di biocombustibili. Il lavoro di tesi avrà come obiettivo la creazione di una libreria Modelica per la simulazione dei sistemi dei processi biochimici di digestione anaerobica. E’ prevista la validazione della libreria basata su dati provenienti da impianti pilota e a piena scala, ed eventualmente la sintesi di strategie ottimali per la messa in servizio degli impianti.
L’emergenza ambientale conseguente al riscaldamento globale sta moltiplicando da un lato gli sforzi per la riduzione delle emissioni di anidride carbonica e dall’altro la ricerca scientifica sulle tecniche di sequestro di tali emissioni e sulla produzione di energie rinnovabili. In particolare, negli ultimi anni si è registrata una crescente diffusione degli impianti di digestione biochimica degli scarti agricoli e urbani per la produzione di biocombustibili. Il lavoro di tesi avrà come obiettivo la creazione di una libreria Modelica per la simulazione dei sistemi dei processi biochimici di digestione anaerobica. E’ prevista la validazione della libreria basata su dati provenienti da impianti pilota e a piena scala, ed eventualmente la sintesi di strategie ottimali per la messa in servizio degli impianti.
Identificazione parametrica di sistemi DAE di indice 1 basata sulla forma LFT
 L’identificazione parametrica di sistemi non lineari, basata su una riformulazione del modello in forma LFT, è stata già applicata con successo in vari casi applicativi, dai processi biochimici alla dinamica dei veicoli. A tal fine è stato creato un toolbox MATLAB. L’obiettivo primario della tesi sarà l’estensione del toolbox al caso dei sistemi DAE (sistemi di equazioni algebrico-differenziali) di indice 1. Come caso applicativo verrà considerata l’identificazione parametrica di un processo innovativo per la produzione di biogas. Inoltre, il metodo verrà confrontato con altri strumenti per l’identificazione parametrica non basati sull’utilizzo delle derivate per il calcolo delle sensitività.
L’identificazione parametrica di sistemi non lineari, basata su una riformulazione del modello in forma LFT, è stata già applicata con successo in vari casi applicativi, dai processi biochimici alla dinamica dei veicoli. A tal fine è stato creato un toolbox MATLAB. L’obiettivo primario della tesi sarà l’estensione del toolbox al caso dei sistemi DAE (sistemi di equazioni algebrico-differenziali) di indice 1. Come caso applicativo verrà considerata l’identificazione parametrica di un processo innovativo per la produzione di biogas. Inoltre, il metodo verrà confrontato con altri strumenti per l’identificazione parametrica non basati sull’utilizzo delle derivate per il calcolo delle sensitività.